
而且还是七位中国 90 后研发的,该机器人的学名叫蜂巢气动网络软手臂,由于酷似大象鼻子,以下姑且称作“象鼻手臂”。
图 | “象鼻手臂”开门(来源:受访者)

除了开门,它还能开抽屉。
图 | “象鼻手臂”开抽屉(来源:受访者)
此外,还能擦玻璃和拧瓶盖,妥妥的家务小助手。
图 | “象鼻手臂”擦玻璃(来源:受访者)
图 | “象鼻手臂”开瓶盖(来源:受访者)
干系论文也已揭橥在机器人顶刊 IJRR(The International Journal of Robotics Research)上,该事情由中国科学技能大学陈小平教授牵头完成,团队成员包括姜皓、王展翅、金渝松、李佩津、干豪杰、陈晓彤、林森。
图 | 几位紧张研究者(来源:受访者)
据悉,该软体机器人手臂紧张由蜂巢构造、气囊网络、驱动系统三个部分组成。
王展翅见告 DeepTech:“该事情首次展示了软体机器人手臂可以完成各种生活中的操纵任务。” 其灵感来自象鼻子,它能像大象鼻子一样随意摆动。
图 | 来回摆动的“象鼻手臂”(来源:受访者)
图 | “象鼻手臂”跟踪目标点(来源:受访者)
研究中,他们提出一种基于 “行为” 的掌握办法,该办法受到人类完成任务的启示。
这种“行为” 中蕴含着一种运动趋势,以转手轮为例,实行 “向前、向下、向后、向上” 四个行为,手轮就能迁徙改变一圈。
图 | 基于 “行为” 的掌握办法(来源:受访者)
就像妈妈教宝宝开门,只需教会他“捉住门把手,向下压,再向后拉”一样,该团队提出的基于行为的掌握,也是在用类似办法和机器人互换。
图 | “象鼻手臂”迁徙改变方向盘(来源:受访者)
为展示它的风雅任务完成能力,在尺子的帮助下,“象鼻子”画出了一条直线。
图 | “象鼻手臂”画直线(来源:受访者)
这实在和人手差不多,由于人类也很难徒手画出直线,每每也得借助尺子,以是“象鼻手臂”的交互能力,在个别功能表现上,丝毫不亚于人类。
从天然蜂巢得到灵感研究中,该团队提出一种蜂巢气动网络构造(Honeycomb Pneumatic Networks ),并基于该构造制备出像象鼻一样、兼具灵巧度和大负载能力的软体手臂,个中手臂负载自重已达到 1:1(3Kg 负载,3Kg 自重)。
图 | 蜂巢气动网络构造动图(来源:受访者)
蜂巢构造采取 3D 打印技能制备,因此可快速将想法进行原型化,利用的材料是热塑性聚氨酯,设计好 3D 模型后,发给 3D 打印做事厂家进行打印。目前,算上材料费和打印做事费,打印一条 60cm 的“象鼻手臂”大约须要 3500 元。
蜂巢气动网络构造,利用压缩气体作为能量来源,它是一条气驱动的软体机器人手臂,压缩气体由气泵供应。
研究中,他们将气囊放置在蜂巢构造内部,通过掌握气囊内部的气压,即可掌握蜂巢构造的形变,进而掌握手臂的运动。
图 | “象鼻手臂”开抽屉示意图(来源:受访者)
姜皓见告 DeepTech,当前大多数软体机器人利用硅胶等较软的柔性材料作为主体。这类软体机器人通过压缩流体、影象合金等办法,驱动柔性材料形变、从而产生机器人的运动。
但是,这种机器人受限于材料特性,很难做到大负载,因此用于机器人手臂的设计存在一些局限。
而本次提出的蜂巢气动网络构造,构成蜂巢的六边形的折叠和伸展供应了形变,即通过构造的折叠 - 伸展形变从而产生机器人的运动,对付该过程,他们称之为构造形变致动。
概括来说,蜂巢构造具备良好的波折和伸长能力,这会给予软手臂良好的灵巧性,此外蜂巢构造也具有良好的抗旋转能力,这也是手臂具有负载能力的根本。
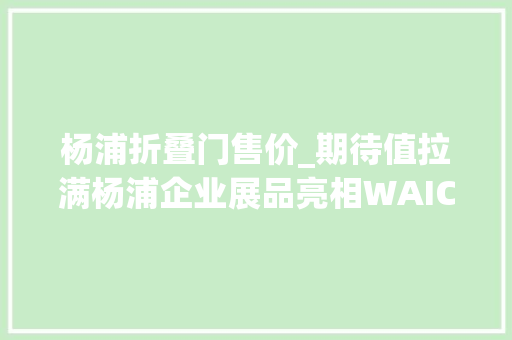
如下图所示,这是蜂巢气动网络软体实行器的基本构造、以及事情事理示意图。两列蜂巢构造单元交错排列,每个单元内高下放置两个气囊,并且用硅胶软管将单个气囊连接成气动网络。
图 | 蜂巢气动网络软体手臂基本构造及事情事理示意图(来源:受访者)
当一侧的气囊膨胀时,该侧构造会在气囊浸染下伸长,另一侧由于构造的回答力,变形较小,因此全体实行器会向相反方向波折。
此外,如果所有气囊同时充气,软体手臂将会伸长,通过掌握单个气囊的充气组合,软体手臂可实现多种波折和伸长变形。正是如此,蜂巢气动网络软体手臂具有良好的灵巧性。
图 | 外部相互浸染下两个运动掌握器的点对点实验(来源:受访者)
气囊利用的是聚氨酯尼龙布,这种复合股料气密性和承压都很好。制作气囊的本钱约 1000 元 / 每条手臂。
个中,利用了成熟的尼龙布加工工艺,气密性和承压也可得到担保。而用于驱动手臂运动的比例调压阀,则是工业上常用的气动元件。将这些部分分别制备、再加以组装,即可得到蜂巢气动网络软手臂。
图 | 蜂巢气动网络软体机器人手臂(来源:受访者)
作为单台样机,手臂整体本钱在 5000 元以内,改进工艺后可能会更便宜。
目前,驱动手臂的掌握系统成本相对较高,用于驱动手臂运动的比例调压阀,是工业上常用的气动元件。研究中,该手臂利用了 16 个比例调压阀进行掌握,本钱约 30000 元,下一步他们将自研低本钱驱动系统,进一步降落总本钱。
未来有望帮人端茶倒水姜皓表示,本次事情瞄准的这天常生活中的操纵任务,就像论文中展示的那样,软体机器人手臂能完成很多日常任务。
他们希望在不久的将来,软手臂可以在家庭做事场景中扮演一个主要角色,帮人端茶倒水,整顿打扫。
在医疗照顾护士场景中,机器人每每须要与病人直接打仗。而由于真实照顾护士场景中存在不愿定性,因此在在照顾护士场景中,刚性机器人手臂无法担保实行操纵任务时的安全性,这也导致其无法在疫情处理等场景中,得到广泛运用。
图 | “象鼻手臂”开瓶盖示意图(来源:受访者)
而“象鼻手臂”具有实质上的柔顺性和安全性,为机器人在医疗照顾护士运用中,供应了一条新思路。此外,它还可以用于接济、航天等场景。
姜皓说,之以是做“象鼻手臂”,是由于虽然机器人已经有半个多世纪的历史,也已被广泛用在工业生产中,但能用于生活的机器人少之又少。
要想在生活中运用,一个主要的哀求是,机器人系统有能力处理它自身、和日常生活环境之间的物理交互。
然而由于生活场景的高度繁芜性和高度不愿定性,这些任务仍旧是机器人领域的一大寻衅。
而软机器人由硅胶等低杨氏模量材料为主系统编制备而成,具有被动柔顺的特性,对人类、对环境、乃至对机器人自身都非常安全。
基于此,他希望将“象鼻手臂”带到人们生活中,切实地帮人类实行一些日常任务,这也是这款安全、高效、低本钱的软机器人手臂出身的初衷。
图 | 左图:利用相同的行为打开不同层的抽屉;右图:可对抗人工滋扰并连续实行开抽屉行为(来源:受访者)
说到本次研究的创新点,王展翅表示:“刚性手臂一样平常有 6 到 7 个自由枢纽关头,只要掌握枢纽关头运动,就能掌握手臂运动。而软手臂由柔性材料制成,它会连续变形,且会有无限的自由度,因此它很难被掌握。
而我们本次提出的掌握,是对领域内的一大贡献,并借此实现了软手臂在和环境交互时的运动掌握,这也是我们打动审稿人的地方。”
他补充称:“蜂巢的硬件设计也是我们的贡献之一,这种设计不仅大略,而且还方便制备。当然,软手臂并非只有这一种设计办法,也有学者提出过其他设计。
谈及实验中印象深刻的事情,姜皓见告 DeepTech,记得有一天晚上在通宵调试机器人,他和师弟王展翅两个人干到凌晨四点多的时候,掌握器出问题了,吸收和发送指令不正常,指示灯非常闪烁,排查了所有部件都没创造问题。
他俩一度以为是外星人在考试测验跟他们通讯,就录了视频并且记录了变革模式,打算破解一波,后来创造是 3-8 译码器坏了。之后他们停下实验,到实验室阁下的走廊上安歇,举头瞥见漫天火红的朝霞,心情惬意。
另据悉,该机器人还参加过 2017 年哈佛大学举办的软体机器人比赛,当年大概有环球一百多军队,这款机器人终极得到了第二名。
谈及未来研究,该团队表示:“接下来团队将连续从自然界汲取灵感,开展软体机器人的干系研究,拓展机器人技能的边界,争取早日让机器人早日走进千家万户”。